Η Hengjiang Intelligent Technology Co., Ltd. είναι επαγγελματίας κατασκευαστής και προμηθευτής συστημάτων ρομπότ ψησίματος και εξοπλισμού βιομηχανικού αυτοματισμού ποιότητας τροφίμων. Το χαρτοφυλάκιο προϊόντων μας καλύπτει αυτόνομα ρομπότ Delta και SCARA, ευέλικτους ρομποτικούς σταθμούς εργασίας και συστήματα διαλογής και συσκευασίας πλήρους γραμμής — όλα σχεδιασμένα για υψηλής ταχύτητας, υψηλής ακρίβειας, υγιεινή λειτουργία σε σύγχρονα περιβάλλοντα παραγωγής αρτοποιίας και κατεψυγμένων τροφίμων. Είτε ψάχνετε για ένα ρομπότ μιας μονάδας για την αυτοματοποίηση ενός κόμβου διεργασίας είτε για μια πλήρη γραμμή με το κλειδί στο χέρι για παραγωγή ντόνατ, πίτσας ή τάρτας αυγών, η Hengjiang παρέχει επεκτάσιμες, αρθρωτές λύσεις που μειώνουν το κόστος εργασίας, εξαλείφουν το ανθρώπινο λάθος και αυξάνουν την απόδοση για να ανταποκριθούν στις απαιτήσεις των έξυπνων εργοστασιακών προτύπων.
Όπως έχει βιώσειΚατασκευαστές ρομπότ Delta, η Hengjiang σχεδιάζει και παράγει τους παράλληλους χειριστές της σειράς HJ-D11003-1 από την αρχή, καλύπτοντας τη μηχανική δομή, το υλικολογισμικό ελέγχου κίνησης και τα εργαλεία τελικού τελεστή. Ένα ρομπότ δέλτα λειτουργεί σε μια παράλληλη κινηματική αρχιτεκτονική: τρεις ανεξάρτητα κινούμενοι βραχίονες συνδέονται σε ένα σταθερό άνω πλαίσιο και όλοι οι ενεργοποιητές αρμών παραμένουν στη σταθερή βάση αντί να κινούνται με το συγκρότημα βραχίονα. Αυτό διατηρεί την κινούμενη μάζα εξαιρετικά χαμηλή, κάτι που είναι ο βασικός λόγος που τα ρομπότ δέλτα μπορούν να επιτύχουν ρυθμούς κύκλου και επιταχύνσεις που δεν μπορούν να ταιριάξουν τα ρομπότ με σειριακό βραχίονα.
Τεχνική αρχιτεκτονική της σειράς HJ-D11003-1: Οι τρεις άνω βραχίονες κινούνται από σερβοκινητήρες τοποθετημένους ομόκεντρα στην πλάκα βάσης. Οι κάτω σύνδεσμοι από ανθρακονήματα ή αλουμίνιο μεταδίδουν κίνηση στην κεντρική κινούμενη πλατφόρμα μέσω αρμών μπάλας και υποδοχής, εξαλείφοντας την αντίδραση. Η τυπική παραλλαγή μη περιστρεφόμενου άξονα χειρίζεται καθαρή επιλογή και τοποθέτηση XYZ, ενώ η παραλλαγή περιστρεφόμενου άξονα προσθέτει έναν τέταρτο άξονα (άξονας R) στον τελικό τελεστή, επιτρέποντας τη διόρθωση προσανατολισμού κατά τη συλλογή — κρίσιμο όταν τα προϊόντα φτάνουν σε τυχαίες γωνίες στον μεταφορέα τροφοδοσίας. Η χωρητικότητα ωφέλιμου φορτίου στοχεύει σε ελαφριά προϊόντα (συνήθως κάτω από 3 kg ανά μονάδα), με διαμέτρους φακέλου εργασίας συνήθως στην περιοχή 800–1.100 mm και κατακόρυφη διαδρομή έως 300 mm.
Έλεγχος και ενσωμάτωση όρασης: Κάθε ρομπότ συνδυάζεται με ένα σερβο ντουλάπι και έναν ειδικό ελεγκτή ρομπότ που εκτελεί το λογισμικό σχεδιασμού κίνησης της Hengjiang. Η μηχανική όραση γίνεται από μια βιομηχανική κάμερα τοποθετημένη ομοαξονικά πάνω από τον μεταφορικό ιμάντα. Το σύστημα όρασης μεταδίδει δεδομένα θέσης και γωνίας προϊόντος στον ελεγκτή σε πραγματικό χρόνο, ο οποίος στη συνέχεια υπολογίζει μεμονωμένες αναθέσεις επιλογής ρομπότ εντός του συμπλέγματος πολλαπλών ρομπότ. Το πρωτόκολλο επικοινωνίας μεταξύ του κεντρικού υπολογιστή όρασης και του ελεγκτή ρομπότ χρησιμοποιεί τυπικό βιομηχανικό Ethernet (EtherCAT ή Modbus TCP), επιτρέποντας την ενσωμάτωση με συστήματα SCADA τρίτων κατασκευαστών χωρίς πρόσθετο ενδιάμεσο λογισμικό.
Ζητήματα υγιεινού σχεδιασμού: Όλες οι επιφάνειες που εκτίθενται στη ζώνη τροφίμων χρησιμοποιούν συνδετήρες από ανοξείδωτο χάλυβα 304 ή 316 και περιβλήματα πολυμερούς συνδέσμου ασφαλή για τρόφιμα. Τα περιβλήματα κινητήρα με βαθμολογία IP65 αποτρέπουν την είσοδο ατμού και νερού έκπλυσης. Η διαχείριση καλωδίων δρομολογεί την καλωδίωση μέσω σφραγισμένων καναλιών αγωγών, εξαλείφοντας τις οριζόντιες επιφάνειες όπου θα μπορούσαν να συσσωρευτούν υπολείμματα.
Προϊόντα που εφαρμόζονται: ντόνατς, ζυμαρικά, ψωμάκια στον ατμό, κρουασάν, τάρτες αυγών, κομμάτια σοκολάτας και άλλα διαμορφωμένα ή χυτά αρτοσκευάσματα ή κατεψυγμένα. Το HJ-D11003-1 διατίθεται τόσο σε διαμορφώσεις μη περιστρεφόμενου όσο και σε περιστρεφόμενο άξονα. Ανατρέξτε στη σελίδα λεπτομερειών κάθε μοντέλου για ακριβείς κινηματικές παραμέτρους, φακέλους προσέγγισης χρηστών και αξιολογήσεις ωφέλιμου φορτίου.
Για εταιρείες που αξιολογούνΚατασκευαστές ρομπότ DeltaΣε παγκόσμιο επίπεδο, η Hengjiang προσφέρει εργοστασιακές δοκιμές αποδοχής (FAT), υποστήριξη απομακρυσμένης θέσης σε λειτουργία και συνεργασία OEM/ODM. Επιδείξεις βίντεο αναφοράς ρομπότ δέλτα σε ζωντανές γραμμές διαλογής ντόνατ και πίτσας είναι διαθέσιμες στοΒιβλιοθήκη βίντεο ρομπότ ψησίματος.
ΚατανόησηΤιμή ρομπότ SCARAπαράγοντες είναι απαραίτητοι πριν δεσμευτείτε σε ένα έργο αυτοματισμού. Τα ρομπότ SCARA της Hengjiang (Selective Compliance Assembly Robot Arm) αναπτύσσονται και κατασκευάζονται ανεξάρτητα, πράγμα που σημαίνει ότι η τιμολόγηση αντικατοπτρίζει την πραγματική μηχανική αξία και όχι τις σημάνσεις του διανομέα. Η τρέχουσα σειρά περιλαμβάνει τέσσερα μοντέλα — HJ-SC1250-R, HJ-SC1050-R, HJ-SCD0625A και HJ-SCD7840 — που διαφοροποιούνται ανάλογα με την απόσταση του βραχίονα (625 mm έως 1,250 mm), το ωφέλιμο φορτίο (5 kg έως 30 kg) και τη διαδρομή του άξονα Z.
Τι καθορίζει την τιμή του ρομπότ SCARA; Πέντε κύριοι παράγοντες διέπουν το τελικό κόστος ενός συστήματος SCARA για τρόφιμα:
Εμβέλεια βραχίονα και κατηγορία ωφέλιμου φορτίου: Η μεγαλύτερη εμβέλεια και το υψηλότερο ωφέλιμο φορτίο απαιτούν βαρύτερα δομικά στοιχεία και μεγαλύτερους σερβοκινητήρες, αυξάνοντας άμεσα το κόστος μονάδας. Το HJ-SC1250-R, για παράδειγμα, καλύπτει εμβέλεια 1.250 mm με χωρητικότητα ωφέλιμου φορτίου 30 kg, κατάλληλο για χειρισμό παλετών, ενώ το HJ-SCD0625A στοχεύει στη διαλογή ακριβείας σε απόσταση 625 mm με ελαφρύτερο φάκελο ωφέλιμου φορτίου και αντίστοιχα χαμηλότερη βαθμίδα τιμής.
Αριθμός αξόνων: Τα τυπικά ρομπότ SCARA λειτουργούν σε τέσσερις άξονες (περιστροφή J1, περιστροφή J2, γραμμική Z, περιστροφή καρπού R). Ορισμένες διαμορφώσεις προσθέτουν έναν πέμπτο άξονα για σύνθετες εργασίες προσανατολισμού. Πρόσθετοι άξονες αυξάνουν τον αριθμό σερβομηχανισμών και την πολυπλοκότητα του ελεγκτή, επηρεάζοντας την τιμή.
Συμπερίληψη συστήματος όρασης: Μια αυτόνομη μονάδα ρομπότ που αναφέρεται χωρίς σύστημα όρασης αντιπροσωπεύει τη βασική τιμή. Όταν συνοδεύεται από την ενσωματωμένη μονάδα μηχανικής όρασης της Hengjiang — βιομηχανική κάμερα υψηλής ανάλυσης, φωτισμός δακτυλίου LED, μονάδα επεξεργασίας εικόνας σε πραγματικό χρόνο και λογισμικό βαθμονόμησης — η τιμή του συστήματος αυξάνεται, αλλά προσφέρει μια λύση με το κλειδί στο χέρι έτοιμη για άμεση ανάπτυξη.
Διαμόρφωση τοποθέτησης: Η σειρά HJ υποστηρίζει στάνταρ εγκατάσταση στην οροφή (ανεστραμμένη), η οποία βελτιστοποιεί τον χώρο του δαπέδου και βελτιώνει την προσβασιμότητα για καθαρισμό. Τα προσαρμοσμένα πλαίσια δαπέδου ή οι βάσεις σκελετών για ειδικές διατάξεις συνεπάγονται πρόσθετο κόστος μηχανικής και κατασκευής.
Σύστημα ελέγχου και άδεια λογισμικού: Ο ενσωματωμένος πίνακας ελέγχου κίνησης της Hengjiang συνδυάζει σερβοενισχυτές, τον ελεγκτή κίνησης ρομπότ, τα ρελέ ασφαλείας και την οθόνη αφής HMI σε ένα περίβλημα. Η πλατφόρμα λογισμικού που αναπτύχθηκε μόνος του υποστηρίζει απομακρυσμένη παρακολούθηση, ενημερώσεις υλικολογισμικού over-the-air και διαχείριση συνταγών για σειρές πολλαπλών προϊόντων, όλα περιλαμβάνονται στο βασικό πακέτο.
Βασικές τεχνικές προδιαγραφές SCARA: Η επαναλαμβανόμενη ακρίβεια τοποθέτησης είναι ±0,025 mm και στους τέσσερις άξονες, επικυρωμένη σε μια δοκιμή αντοχής 100.000 κύκλων. Η μέγιστη γραμμική ταχύτητα του τελικού τελεστή φτάνει τα 2 m/s. Ολόκληρο το σώμα του ρομπότ ζυγίζει περίπου 40 κιλά, απλοποιώντας τις εναέριες δομικές απαιτήσεις. Όλοι οι σύνδεσμοι είναι σφραγισμένοι με ελάχιστο IP54, με IP65 διαθέσιμο για περιβάλλοντα πλύσης.
Για λεπτομερείς τιμές κάθε μοντέλου και διαμόρφωσης, επικοινωνήστε με την ομάδα πωλήσεων της Hengjiang μέσω τουΔιαδικτυακή έρευνασελίδα.
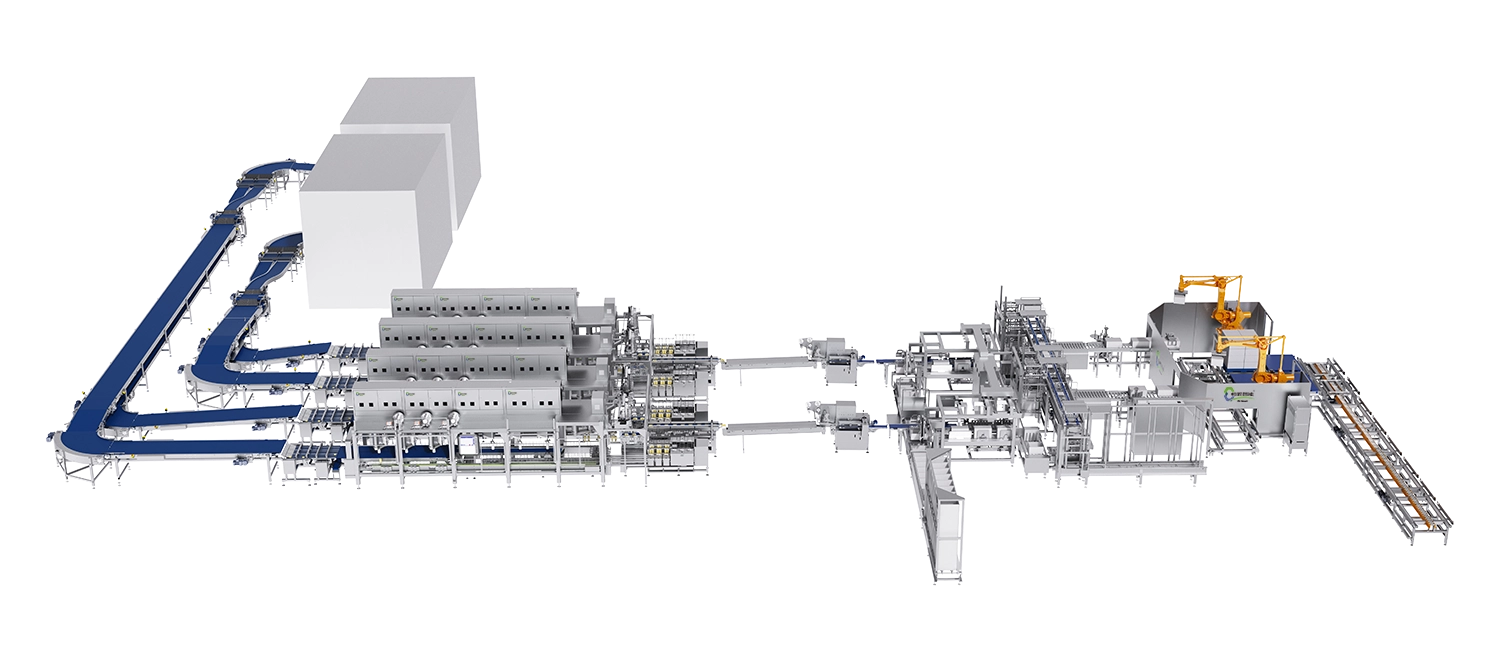
ΤοΣταθμός εργασίας ρομπότ SCARAαπό το Hengjiang είναι μια προσχεδιασμένη κυψέλη αυτοματισμού που ενσωματώνει ένα ρομπότ SCARA ποιότητας τροφίμων, μηχανική όραση, μεταφορείς τροφοδοσίας και εξόδου, πλαίσιο από ανοξείδωτο χάλυβα, προστασία ασφαλείας και ενοποιημένο πίνακα ελέγχου σε μια ενιαία μονάδα που μπορεί να αναπτυχθεί. Αυτή η ενσωμάτωση σε επίπεδο σταθμού εργασίας μειώνει σημαντικά τον επιτόπιο χρόνο μηχανικής σε σύγκριση με την αγορά μεμονωμένων εξαρτημάτων και την ανεξάρτητη ενσωμάτωσή τους.
Βασική αρχιτεκτονική σταθμού εργασίας: Η διάταξη των κυψελών τοποθετεί το ρομπότ SCARA κεντρικά πάνω από τον μεταφορέα τροφοδοσίας. Ένας οπτικός σταθμός ανάντη του φακέλου εργασίας του ρομπότ καταγράφει εικόνες από κάθε εισερχόμενο προϊόν. Οι επεξεργασμένες συντεταγμένες προωθούνται στον ελεγκτή ρομπότ μέσω EtherCAT εντός καθυστέρησης 20 ms, διασφαλίζοντας ότι το ρομπότ λαμβάνει ακριβή δεδομένα επιλογής πριν το προϊόν φτάσει στη ζώνη επιλογής. Οι μεταφορείς εξόδου στη μία ή και στις δύο πλευρές μεταφέρουν τα ταξινομημένα προϊόντα σε σταθμούς συσκευασίας κατάντη ή φόρτωσης δίσκων.
Η κορυφαία εφαρμογή που παρουσιάστηκε στο Hengjiang είναι ο σταθμός εργασίας ταξινόμησης και στοίβαξης κελύφους τάρτας κατεψυγμένων αυγών. Σε αυτή τη διαμόρφωση, φρεσκοκαλουπωμένα κατεψυγμένα κελύφη τάρτας αυγών φτάνουν στον ιμάντα τροφοδοσίας σε τυχαίους προσανατολισμούς. Το σύστημα όρασης προσδιορίζει την κεντρική θέση και τη γωνία προσανατολισμού κάθε κελύφους. Το ρομπότ SCARA επιλέγει κάθε κέλυφος και το τοποθετεί σε μια καθορισμένη θέση στοίβας με επαναληψιμότητα ±0,02 mm, σχηματίζοντας ομοιόμορφες στοίβες προκαθορισμένου αριθμού που στη συνέχεια μεταφέρονται στο σταθμό συσκευασίας. Η κυψέλη επιτυγχάνει ρυθμούς απόδοσης που υπερβαίνουν αυτό που μπορούν να παράγουν τρεις έως τέσσερις χειροκίνητοι χειριστές, με μηδενική μόλυνση από την ανθρώπινη επαφή.
Λεπτομέρειες υγιεινής κατασκευής: Το πλαίσιο του σταθμού εργασίας είναι πλήρως συγκολλημένο από ανοξείδωτο χάλυβα 304 με ηλεκτρογυαλισμένες επιφάνειες. Οι μεταφορικοί ιμάντες χρησιμοποιούν υλικό PU για τρόφιμα. Όλα τα πνευματικά εξαρτήματα για τη λαβή τελικού τελεστή είναι τοποθετημένα μέσα στο σφραγισμένο περίβλημα του βραχίονα ρομπότ, όχι εκτεθειμένα εξωτερικά. Ο ηλεκτρικός πίνακας είναι εγκατεστημένος έξω από τη ζώνη τροφίμων για να αποτρέψει τη θερμότητα και τις ηλεκτρομαγνητικές παρεμβολές να επηρεάσουν την ποιότητα του προϊόντος.
Επεκτασιμότητα: Ένας μεμονωμένος σταθμός εργασίας SCARA μπορεί να λειτουργήσει αυτόνομα ή να δικτυωθεί σε ένα μεγαλύτεροΓραμμή συσκευασίας διαλογής ρομπότ SCARAΑυτό περιλαμβάνει αυτόματη φόρτωση δίσκου, χαρτοκιβώτιο και συσκευασία θήκης. Η αρθρωτή αρχιτεκτονική επικοινωνίας (συμβατή με OPC-UA) επιτρέπει στο σταθμό εργασίας να αναφέρει δεδομένα παραγωγής — αριθμός κύκλων, ρυθμός απόρριψης, τηλεμετρία δύναμης λαβής — σε ένα κεντρικό σύστημα MES ή ERP.
Αυτός ο σταθμός εργασίας είναι επίσης η διαδρομή ενοποίησης εισαγωγικού επιπέδου για κατασκευαστές που θέλουν να αυτοματοποιήσουν ένα βήμα διαδικασίας πριν δεσμευτούν σε μια λύση πλήρους γραμμής. Δείτε τοΕξυπηρέτηση και υποστήριξηενότητα για λεπτομέρειες εγκατάστασης, δοκιμής αποδοχής και εκπαίδευσης χειριστή.
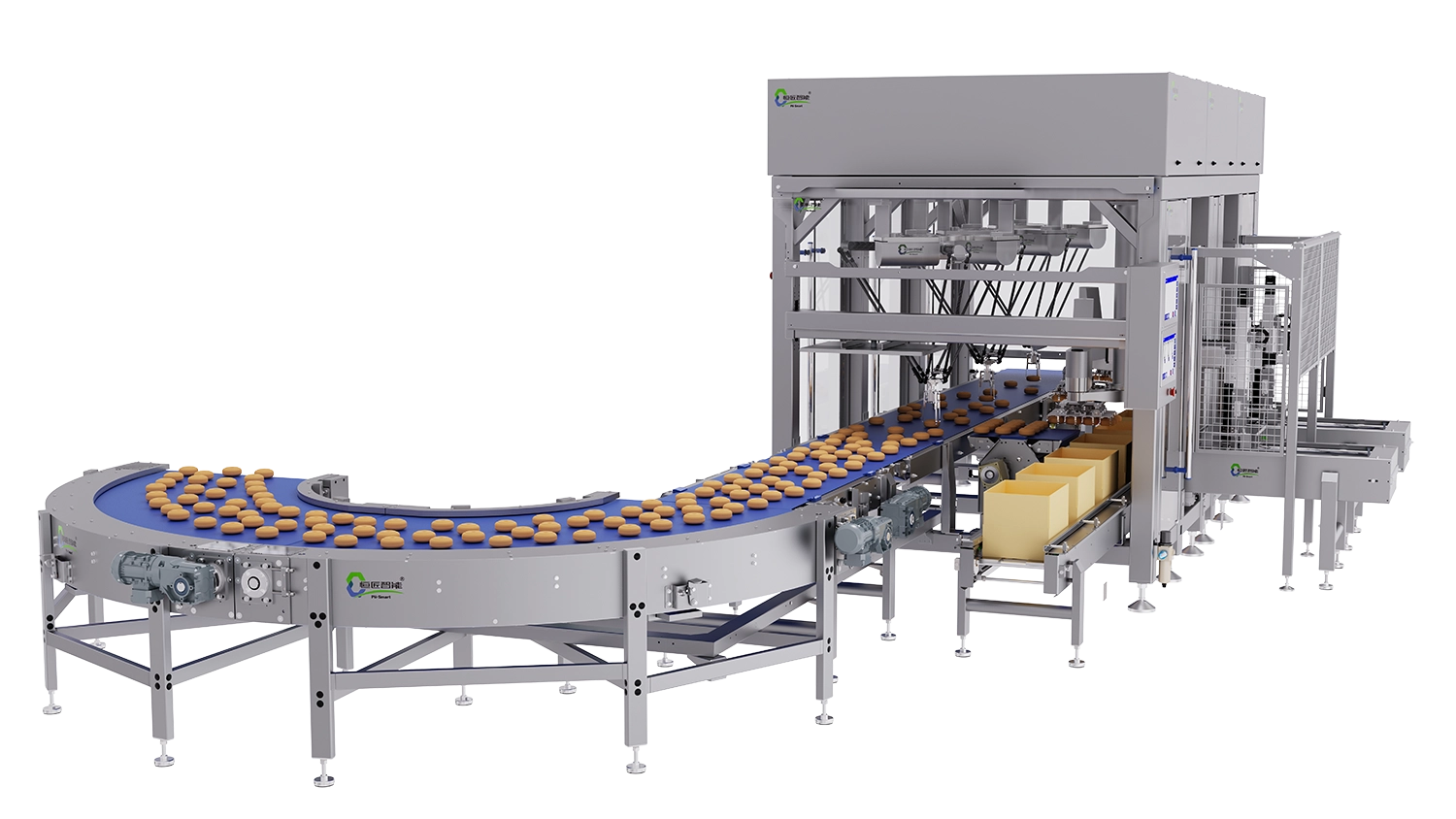
ΤοΣταθμός εργασίας ρομπότ Deltaαπό το Hengjiang διαμορφώνει ένα ή περισσότερα ρομπότ δέλτα HJ-D11003-1 πάνω από έναν κοινόχρηστο μεταφορικό ιμάντα, με ένα ενοποιημένο σύστημα όρασης που διαχειρίζεται τις αναθέσεις επιλογής σε όλα τα ρομπότ του συμπλέγματος. Αυτή η αρχιτεκτονική πολλαπλών ρομπότ είναι η βιομηχανική προσέγγιση για την επίτευξη πολύ υψηλής απόδοσης σε ταχέως κινούμενες γραμμές τροφοδοσίας όπου ένα μόνο ρομπότ θα ήταν το σημείο συμφόρησης.
Σταθμός εργασίας δέλτα μίας μονάδας: Ένας μεμονωμένος HJ-D11003-1 τοποθετημένος πάνω από έναν ιμάντα πλάτους 500–800 mm χειρίζεται προϊόντα που φτάνουν με ταχύτητες έως περίπου 60–80 επιλογές ανά λεπτό, ανάλογα με τη γεωμετρία του προϊόντος και τον χρόνο κύκλου της λαβής. Το σύστημα όρασης φωτίζει τη ζώνη με μια δομημένη συστοιχία LED, καταγράφει εικόνες με προγραμματισμένο ρυθμό ενεργοποίησης και εξάγει δεδομένα θέσης XY συν γωνία για κάθε προϊόν που ανιχνεύεται. Ο ελεγκτής ρομπότ διατηρεί μια ουρά από εκκρεμείς επιλογές, εκτελώντας τις με τη σειρά που ελαχιστοποιεί την απόσταση διαδρομής του βραχίονα (προγραμματισμός πλησιέστερου γείτονα), μεγιστοποιώντας την αποτελεσματική απόδοση.
Σύμπλεγμα δέλτα πολλαπλών μονάδων: Όταν η ταχύτητα γραμμής ή η πυκνότητα του προϊόντος υπερβαίνει τη χωρητικότητα ενός ρομπότ, δύο, τρία ή περισσότερα ρομπότ δέλτα είναι διατεταγμένα σε σειρά κατά μήκος της κατεύθυνσης του μεταφορέα. Ο κεντρικός υπολογιστής κοινής όρασης εκχωρεί κάθε εισερχόμενο προϊόν σε ένα συγκεκριμένο ρομπότ με βάση τη ζώνη θέσης και τη διαθεσιμότητα του ρομπότ (εξισορρόπηση φορτίου). Εάν ένα ρομπότ είναι απασχολημένο με την ολοκλήρωση μιας προηγούμενης επιλογής, η εργασία προχωρά στην επόμενη διαθέσιμη μονάδα. Αυτός ο συνεργατικός προγραμματισμός διασφαλίζει ότι κανένα προϊόν δεν εξέρχεται από τη ζώνη συλλογής χωρίς χειρισμό υπό κανονικές συνθήκες λειτουργίας.
Εφαρμογή ταξινόμησης ντόνατ: Στην εφαρμογή Donut Robot Sorting Workstation, η Hengjiang αναπτύσσει ένα σύμπλεγμα δέλτα πολλαπλών ρομπότ για να ταξινομήσει τα φρεσκοτηγανισμένα ή κατεψυγμένα ντόνατς κατά μέγεθος, σχήμα και απόσταση σε δίσκους ή καλούπια συσκευασίας. Η μονάδα ανίχνευσης ελαττωμάτων του συστήματος όρασης ελέγχει ταυτόχρονα για σπασμένα ή κακοσχηματισμένα ντόνατς, εκτρέποντας τα απορριπτόμενα σε ξεχωριστή λωρίδα. Ολόκληρο το κύτταρο διασυνδέεται απευθείας με το Hengjiang'sΓραμμή παραγωγής σχηματισμού ντόνατανάντη, δημιουργώντας μια συνεχή αυτοματοποιημένη ροή από τη διαμόρφωση της ζύμης έως τη διαλογή και τη συσκευασία.
Επιλογές εργαλείων τελικού τελεστή: Η Hengjiang προμηθεύει ιδιόκτητες λαβές που ταιριάζουν με κοινά προϊόντα αρτοποιίας — βεντούζες κενού από σιλικόνη για τρόφιμα για προϊόντα λείας επιφάνειας, προσαρμοστικά μηχανικά δάχτυλα για ακανόνιστα σχήματα και εργαλεία συστοιχίας βελόνων για ευαίσθητα αρτοσκευάσματα. Τα συστήματα γρήγορης αλλαγής τελικού τελεστή επιτρέπουν στους χειριστές να αλλάζουν τύπους προϊόντων σε λιγότερο από δύο λεπτά χωρίς εργαλεία.
Ασφάλεια και συμμόρφωση: Κάθε σταθμός εργασίας περιλαμβάνει κουρτίνες φωτός σε όλα τα σημεία πρόσβασης χειριστή, κυκλώματα διακοπής έκτακτης ανάγκης και μονάδες ρελέ με βαθμολογία ασφαλείας που συμμορφώνονται με το ISO 13849 PLd. Το λογισμικό ελέγχου επιβάλλει όρια ταχύτητας και δύναμης όταν η κουρτίνα φωτός ασφαλείας είναι μερικώς μπλοκαρισμένη (λειτουργία μειωμένης ταχύτητας) αντί να εκτελεί σκληρή διακοπή, ελαχιστοποιώντας τη διακοπή της παραγωγής κατά τη σύντομη είσοδο του χειριστή.
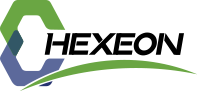
ΤοΓραμμή συσκευασίας διαλογής ρομπότ SCARAαπό το Hengjiang είναι ένα πλήρες σύστημα παραγωγής που παίρνει μη ταξινομημένα τρόφιμα στην είσοδο και παραδίδει γεμάτα, σφραγισμένα χαρτοκιβώτια ή δίσκους στην έξοδο — χωρίς χειροκίνητη παρέμβαση μεταξύ αυτών των δύο σημείων. Αυτή η λύση σε επίπεδο γραμμής αντιπροσωπεύει το υψηλότερο επίπεδο ενοποίησης στο ρομποτικό χαρτοφυλάκιο της Hengjiang και έχει σχεδιαστεί για κατασκευαστές που εκτελούν SKU μεγάλου όγκου με αυστηρές απαιτήσεις συνέπειας εξόδου.
Αρχιτεκτονική συστήματος: Η σειρά αποτελείται από έξι λειτουργικές ζώνες διατεταγμένες σε γραμμική διάταξη ή σε σχήμα L για να ταιριάζουν στον διαθέσιμο χώρο του εργοστασίου. Η ζώνη 1 είναι το ρυθμιστικό τροφοδοσίας, όπου τα προϊόντα από μια ανάντη διαδικασία ψησίματος ή κατάψυξης παραλαμβάνονται σε έναν μεταφορέα διασποράς που τα διασκορπίζει σε ένα μόνο στρώμα για επιθεώρηση όρασης. Η Ζώνη 2 είναι ο σταθμός επιθεώρησης όρασης, ο οποίος εκτελεί 100% επιθεώρηση προϊόντος για διαστάσεις, σχήμα, ομοιομορφία χρώματος και ελαττώματα επιφάνειας. Η Ζώνη 3 είναι η ζώνη συλλογής ρομπότ SCARA, όπου ένα ή δύο ρομπότ SCARA εκτελούν συντονισμένη επιλογή και τοποθέτηση αποδεκτών προϊόντων σε δίσκους ή καλούπια συσκευασίας τοποθετημένα σε έναν παράλληλο μεταφορέα ευρετηρίου. Η Ζώνη 4 χειρίζεται την επαλήθευση πλήρωσης δίσκου μέσω μιας ζυγαριάς ελέγχου βάρους που είναι ενσωματωμένη στην τροφοδοσία της ζώνης ρομπότ. Η Ζώνη 5 είναι η αυτόματη μονάδα καλύμματος δίσκου ή χαρτοκιβωτίου, η οποία εφαρμόζει καπάκια μεμβράνης ή χαρτιού και σφραγίζει τις άκρες του δίσκου. Η Ζώνη 6 είναι η μονάδα συσκευασίας και παλετοποίησης θήκης, η οποία ομαδοποιεί σφραγισμένους δίσκους σε κιβώτια αποστολής και τους στοιβάζει σε παλέτες.
Εφαρμογή: Γραμμή παραγωγής διαλογής και συσκευασίας κελύφους τάρτας κατεψυγμένων αυγών. Τα ξεφορμαρισμένα κατεψυγμένα τσόφλια τάρτας αυγών μπαίνουν στη γραμμή στη Ζώνη 1 με ρυθμούς έως και 200 τεμάχια ανά λεπτό. Το σύστημα όρασης στη Ζώνη 2 εντοπίζει και απορρίπτει σπασμένα ή παραμορφωμένα κελύφη (συνήθως λιγότερο από το 2% της παραγωγής σε μια καλά συντηρημένη γραμμή διαμόρφωσης). Τα ρομπότ SCARA στη Ζώνη 3 τοποθετούν τα αποδεκτά κελύφη σε πλαστικούς δίσκους 6 ή 12 κοιλοτήτων που ευρετηριάζονται στον παράλληλο μεταφορέα με ακρίβεια τοποθέτησης δίσκου ±0,5 mm. Η ολοκληρωμένη γραμμή παραδίδει σφραγισμένους δίσκους με ετικέτα έτοιμους για διανομή ψυχρής αλυσίδας. Δείτε το upstreamΓραμμή παραγωγής τάρτας αυγών τύπου Χονγκ Κονγκγια το πλαίσιο σχετικά με τον τρόπο παραγωγής των σχηματισμένων κελυφών πριν από την είσοδο σε αυτό το σύστημα διαλογής και συσκευασίας.
Ενσωμάτωση ελέγχου: Ολόκληρη η σειρά λειτουργεί σε ένα μόνο εποπτικό PLC με οθόνη αφής HMI 21 ιντσών. Ο υποελεγκτής κάθε ζώνης επικοινωνεί με το εποπτικό PLC μέσω του PROFINET. Οι χειριστές μπορούν να παρακολουθούν την απόδοση ανά ζώνη, το ιστορικό συναγερμών, τα ποσοστά απόρριψης και τις μετρήσεις OEE (Συνολική Αποτελεσματικότητα Εξοπλισμού) σε πραγματικό χρόνο. Το σύστημα υποστηρίζει αποθήκευση συνταγών για πολλαπλά SKU προϊόντων. Η εναλλαγή μεταξύ SKU απαιτεί μόνο μια επιλογή συνταγής στο HMI συν μια φυσική αλλαγή μορφής τελικού τελεστή και δίσκου, που μπορεί να επιτευχθεί σε λιγότερο από 15 λεπτά.
Αποτύπωμα και βοηθητικά προγράμματα: Μια πλήρης σειρά για κελύφη τάρτας αυγών καταλαμβάνει περίπου 15–20 μέτρα σε μήκος και 3–4 μέτρα σε πλάτος. Η απαίτηση ισχύος είναι 380V τριφασική, 50 Hz, συνήθως 15–25 kW συνολικό συνδεδεμένο φορτίο. Απαιτείται πεπιεσμένος αέρας στα 0,6 MPa για την ενεργοποίηση της λαβής και τη σύσφιξη του πνευματικού δίσκου. Οι συνδέσεις νερού για CIP (Clean-In-Place) είναι προαιρετικές ανάλογα με την ταξινόμηση της ζώνης υγιεινής της εγκατάστασης.
Η γραμμή συσκευασίας αυτόματης διαλογής ντόνατ στο Hengjiang συνδυάζει ρομπότ SCARA και δέλτα σε μια συντονισμένη διαμόρφωση ειδικά βελτιστοποιημένη για τα φυσικά χαρακτηριστικά των ντόνατς — στρογγυλά ή οβάλ σχήματα, απαλή παραμορφώσιμη υφή, ποικίλες επιφάνειες υαλοπινάκων και υψηλές ταχύτητες γραμμής από φριτέζες ή στεγανωτικά υψηλής χωρητικότητας. Αυτή η γραμμή τεκμηριώνεται στοσυνδυασμένη χρήση ρομπότ SCARA και deltaτμήμα του ολοκληρωμένου χαρτοφυλακίου σταθμών εργασίας της Hengjiang.
Γιατί τα ντόνατς απαιτούν μια εξειδικευμένη σειρά: Τα ντόνατς παρουσιάζουν μοναδικές προκλήσεις χειρισμού. Η μαλακή, κολλώδης επιφάνειά τους καθιστά κρίσιμη την επιλογή κυπέλλου κενού — η υπερβολική αναρρόφηση παραμορφώνει το προϊόν. πολύ λίγο προκαλεί πτώσεις. Η κυκλική γεωμετρία τους σημαίνει ότι ο έλεγχος προσανατολισμού είναι λιγότερο κρίσιμος από ό,τι για τα κατευθυντικά προϊόντα, αλλά η σταθερή απόσταση στο δίσκο συσκευασίας είναι απαραίτητη για την παρουσίαση. Οι γραμμές ντόνατ μεγάλου όγκου (βιομηχανικές φριτέζες που παράγουν 3,000–6,000 τεμάχια την ώρα) απαιτούν συμπλέγματα ρομπότ ικανά για διαρκή απόδοση χωρίς υποβάθμιση της απόδοσης που σχετίζεται με την κόπωση σε λειτουργίες πολλαπλών βάρδιων.
Διαμόρφωση γραμμής για ντόνατς: Τα ρομπότ Delta χειρίζονται την κύρια εργασία επιλογής και τοποθέτησης υψηλής ταχύτητας από τον μεταφορέα εξόδου της φριτέζας σε ενδιάμεσους δίσκους. Οι ρυθμοί κύκλου τους 60–100 επιλογές ανά λεπτό ανά μονάδα, συνδυασμένοι σε ένα σύμπλεγμα τριών ή τεσσάρων ρομπότ, ταιριάζουν με τους ρυθμούς παραγωγής της βιομηχανικής φριτέζας. Στη συνέχεια, τα ρομπότ SCARA χειρίζονται τη δευτερεύουσα εργασία: τη συλλογή προδιαλεγμένων ντόνατς από ενδιάμεσους δίσκους και την τοποθέτησή τους σε συσκευασίες λιανικής με ακριβή προσανατολισμό, επαλήθευση μέτρησης και στοίβαξη στρώσεων. Αυτός ο καταμερισμός εργασίας παίζει με τη δύναμη κάθε τύπου ρομπότ — δέλτα για ακατέργαστη ταχύτητα, SCARA για τοποθέτηση ακριβείας και βαρύτερο ωφέλιμο φορτίο.
Συμβατότητα υαλοπινάκων: Το εργαλείο τελικού τελεστή στη σειρά ντόνατ έχει σχεδιαστεί για τζάμια, επικαλυμμένες με ζάχαρη και απλές επιφάνειες. Οι βεντούζες σιλικόνης με ρυθμιζόμενους ρυθμιστές κενού αντισταθμίζουν τη διακύμανση της επιφάνειας. Ο αλγόριθμος ανάκλασης-κανονικοποίησης του συστήματος όρασης χειρίζεται τη διακύμανση αντίθεσης μεταξύ ματ και γυαλιστερών υαλοπινάκων χωρίς να απαιτείται ξεχωριστή βαθμονόμηση ανά παραλλαγή προϊόντος.
Ενσωμάτωση με τη γραμμή διαμόρφωσης: Αυτή η γραμμή συσκευασίας διασυνδέεται απευθείας με την Hengjiang'sΓραμμή παραγωγής σχηματισμού ντόνατ, δημιουργώντας μια συνεχή αλυσίδα από την παραγωγή έως τη συσκευασία. Η Hengjiang προσφέρει παράδοση έργων με το κλειδί στο χέρι που καλύπτει τόσο τη γραμμή διαμόρφωσης όσο και τη γραμμή διαλογής και συσκευασίας στο πλαίσιο μιας ενιαίας σύμβασης, με ενοποιημένη θέση σε λειτουργία και εκπαίδευση χειριστή.
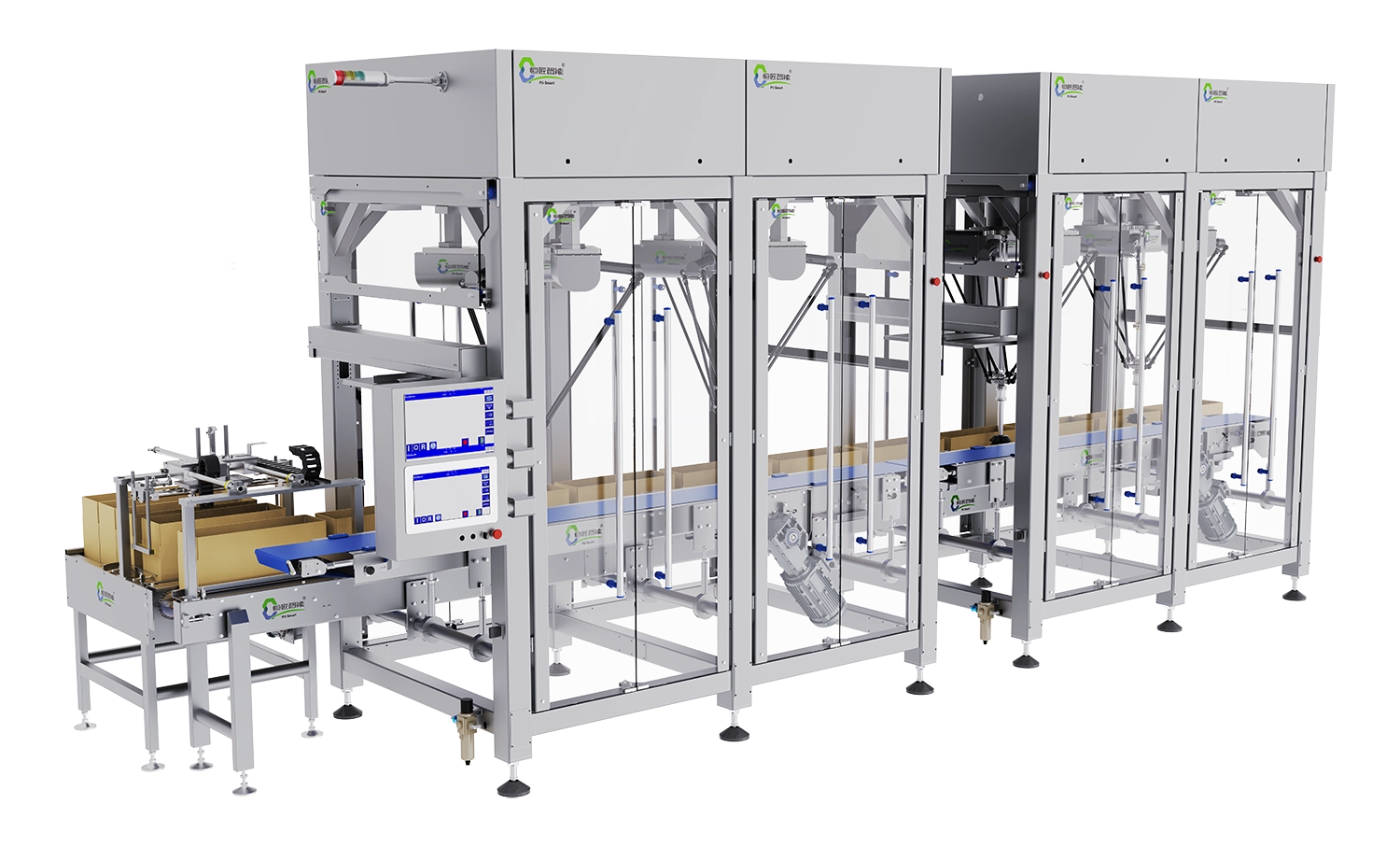
ΤοΑυτοματοποιημένη γραμμή συσκευασίας διαλογής πίτσαςστο Hengjiang χρησιμοποιεί αναπτύξεις ρομπότ δέλτα διπλής μονάδας ή πολλαπλών μονάδων για να χειριστεί τη διαλογή και τη συσκευασία κατεψυγμένης πίτσας, αντιμετωπίζοντας τις συγκεκριμένες προκλήσεις των επίπεδων προϊόντων διατροφής μεγάλης διαμέτρου που πρέπει να τοποθετούνται σε χαρτοκιβώτια με ακρίβεια χιλιοστού.
Προκλήσεις χειρισμού ειδικά για την πίτσα: Οι κατεψυγμένες πίτσες είναι μεγάλες (συνήθως διάμετρος 200–350 mm), σχετικά βαριές σε σύγκριση με τα ντόνατς ή τα αρτοσκευάσματα (200–500 g ανά μονάδα) και πρέπει να τοποθετούνται σε χάρτινα μανίκια στενής ανοχής χωρίς ζημιά στις άκρες στο επάνω στρώμα ή στην κρούστα. Οι εσωτερικές διαστάσεις του χαρτοκιβωτίου συσκευασίας αφήνουν μόνο 3-5 mm διάκενο σε κάθε πλευρά, πράγμα που σημαίνει ότι η ακρίβεια τοποθέτησης και η επαναληψιμότητα του ρομπότ πρέπει να είναι αυστηρότερες από την ανοχή του διάκενου. Το HJ-D11003-1 της Hengjiang με περιστρεφόμενο άξονα επιτυγχάνει επαναληψιμότητα τοποθέτησης ±0.5 mm στο επίπεδο XY σε πλήρη ταχύτητα λειτουργίας — εντός της απαιτούμενης ανοχής για τυπικές μορφές χαρτοκιβωτίων πίτσας.
Διαμορφώσεις δέλτα διπλής μονάδας και πολλαπλών μονάδων: Οι γραμμές πίτσας που τεκμηριώνονται στο χαρτοφυλάκιο της Hengjiang περιλαμβάνουν τη γραμμή διαλογής και συσκευασίας πίτσας Α και τη γραμμή διαλογής και συσκευασίας πίτσας Β, που αντιπροσωπεύουν διαφορετικά επίπεδα απόδοσης και διαμορφώσεις διάταξης. Η γραμμή Α χρησιμοποιεί ένα σύμπλεγμα δέλτα δύο ρομπότ για γραμμές μεσαίας χωρητικότητας (800–1,500 πίτσες την ώρα). Η γραμμή Β χρησιμοποιεί ένα σύμπλεγμα τριών ή τεσσάρων ρομπότ για γραμμές υψηλής χωρητικότητας που ταιριάζουν με την απόδοση βιομηχανικών φούρνων καταστρώματος ή συστημάτων ψησίματος σήραγγας. Και οι δύο γραμμές χρησιμοποιούν την ίδια αρχιτεκτονική όρασης και ελέγχου, που διαφέρουν μόνο ως προς τον αριθμό των ρομπότ και το πλάτος του μεταφορέα.
Ανέγερση και σφράγιση χαρτοκιβωτίων: Η γραμμή συσκευασίας ενσωματώνει έναν αυτόματο ανυψωτήρα χαρτοκιβωτίων στην είσοδο της ζώνης συσκευασίας, μια μονάδα φόρτωσης ρομπότ όπου τα ρομπότ δέλτα τοποθετούν πίτσες σε στημένα χαρτοκιβώτια και έναν σταθμό σφράγισης κόλλας θερμής τήξης στην έξοδο. Ένα σύστημα επισήμανσης εκτύπωσης και εφαρμογής εφαρμόζει μεταβλητές πληροφορίες (κωδικός παρτίδας, ημερομηνία ανάλωση κατά προτίμηση πριν από, βάρος) αμέσως μετά τη σφράγιση. Ολόκληρη η ακολουθία από τη συλλογή πίτσας έως το σφραγισμένο χαρτοκιβώτιο με ετικέτα ολοκληρώνεται σε λιγότερο από 8 δευτερόλεπτα ανά μονάδα στη γραμμή υψηλής χωρητικότητας.
Θέματα ψυχρής ζώνης: Οι σειρές κατεψυγμένης πίτσας λειτουργούν σε ζώνες παραγωγής χαμηλής θερμοκρασίας (συνήθως 0°C έως 10°C περιβάλλοντος). Τα ρομπότ δέλτα της Hengjiang καθορίζονται με γράσο χαμηλής θερμοκρασίας για όλες τις επιφάνειες ρουλεμάν και σφραγισμένες περιελίξεις κινητήρα που έχουν αξιολογηθεί για συνεχή λειτουργία σε περιβάλλοντα ψυχρού θαλάμου. Η διαχείριση συμπύκνωσης στον ηλεκτρικό πίνακα χρησιμοποιεί θερμοστατικά ελεγχόμενους θερμαντήρες για την αποφυγή συσσώρευσης υγρασίας κατά τις μεταβάσεις θερμοκρασίας.
Ανάντη ενσωμάτωση: Η γραμμή διαλογής και συσκευασίας πίτσας συνδέεται απευθείας με το Hengjiang'sΓραμμή παραγωγής διαμόρφωσης πίτσαςκαι τη σχετική έξοδο σήραγγας ψησίματος. Αυτό επιτρέπει την προμήθεια ενός ολοκληρωμένου έργου αυτοματισμού εργοστασίου πίτσας από έναν μόνο προμηθευτή, απλοποιώντας τη διαχείριση έργου, την ευθύνη εγγύησης και τον μακροπρόθεσμο συντονισμό των υπηρεσιών.
Για επιδείξεις βίντεο και των δύο διαμορφώσεων της γραμμής πίτσας σε λειτουργία, επισκεφθείτε τοΕνότητα βίντεο ρομπότ ψησίματος.
Η Hengjiang Intelligent Technology Co., Ltd. είναι ένας κάθετα ολοκληρωμένος κατασκευαστής: ο μηχανικός σχεδιασμός, η ανάπτυξη σερβοκινητήρα, το λογισμικό ελέγχου κίνησης ρομπότ, οι αλγόριθμοι μηχανικής όρασης και η ενοποίηση συστήματος εκτελούνται όλα εσωτερικά. Αυτό σημαίνει ότι δεν υπάρχουν κίνδυνοι συμβατότητας μεταξύ προμηθευτών στις κρίσιμες διεπαφές μεταξύ ρομπότ, όρασης και ελέγχου — ένα κοινό σημείο αστοχίας σε ολοκληρωμένα συστήματα τρίτων.
Όλος ο εξοπλισμός υποβάλλεται σε αυστηρή εργοστασιακή δοκιμή αποδοχής (FAT) στις εγκαταστάσεις της Hengjiang πριν από την αποστολή, προσομοιώνοντας τις συνθήκες παραγωγής των πελατών με αντιπροσωπευτικά προϊόντα. Η εγκατάσταση και η θέση σε λειτουργία πραγματοποιούνται από την τεχνική ομάδα της Hengjiang. Η υποστήριξη μετά τη θέση σε λειτουργία περιλαμβάνει απομακρυσμένη παρακολούθηση μέσω της πλατφόρμας ελέγχου με δυνατότητα IoT, με πρόσβαση σε πραγματικό χρόνο σε αρχεία καταγραφής σφαλμάτων, δεδομένα κύκλου και μετρήσεις απόδοσης. Για πλήρη περιγραφή του πλαισίου σέρβις — συμπεριλαμβανομένων των πρωτοκόλλων επιθεώρησης εξοπλισμού, των προτύπων εγκατάστασης και των όρων εγγύησης — ανατρέξτε στοΕξυπηρέτηση και υποστήριξησελίδα.
Η Hengjiang προσφέρει επίσης πλήρεις γραμμές παραγωγής ψησίματος που καλύπτουν κατηγορίες ζαχαροπλαστικής, κρουασάν, τάρτας αυγών, ντόνατ, πίτσας και πίτας. Όταν μια ρομποτική γραμμή διαλογής και συσκευασίας συνδυάζεται με μια γραμμή διαμόρφωσης και ψησίματος Hengjiang, το αποτέλεσμα είναι μια πλήρως αυτοματοποιημένη έξυπνη εργοστασιακή κυψέλη με ένα μόνο σημείο τεχνικής ευθύνης. Εξερευνήστε το πλήρεςΧαρτοφυλάκιο γραμμών παραγωγήςγια επιλογές εξοπλισμού ανάντη ή επισκεφθείτε τοΣελίδα εταιρείας Hexeon Groupγια το ιστορικό της εταιρείας, την παραγωγική ικανότητα και τις πληροφορίες κουλτούρας.
Για ερωτήσεις σχετικά με συγκεκριμένα προϊόντα, συζητήσεις σχετικά με τις τιμές ή ρυθμίσεις επισκέψεων στο εργοστάσιο, χρησιμοποιήστε τοΣελίδα επικοινωνίαςγια να επικοινωνήσετε απευθείας με την τεχνική ομάδα πωλήσεων της Hengjiang.